
Hi! I am currently pursuing a Master degree in Artificial Intelligence & Robotics
at Sapienza University of Rome, Italy.
I am passionate about Robotics and Computer Science. My research interests include manipulation, trajectory optimization and real-time nonlinear model predictive control.
Education and Research Experiences
April 2021 - Present
Visiting student at PRISMA Lab, University of Naples Federico II, Italy. I am working under the mentorship of Prof. Bruno Siciliano .
September 2019 - Present
Graduate Student in Artificial Intelligence & Robotics at Sapienza University of Rome, Italy.
September 2018 - May 2019
Research Assistant at Centre for Applied Autonomous Sensor Systems (AASS) of the Örebro University, Sweden. I worked under the mentorship of Prof. Henrik Andreasson and Prof. Federico Pecora .
July 2018 - August 2018
Research Intern at Indraprastha Institute of Information Technology Delhi, India. My supervisor was Prof. P.B. Sujit.
January 2018 - March 2018 & June 2017 - August 2017
Research Intern at International Institute of Information Technology Hyderabad, India. My supervisor was Prof. K. Madhava Krishna.
August 2014 - July 2018
Bachelor degree in Electronics and Communication Engineering at Delhi Technological University(Formerly Delhi College of Engineering), India.
Skills
Operating Systems
Linux, ROS
Programming Languages
C/C++, MATLAB, Python
Numerical Optimization Tools
CasADi, ACADO, acados
Hardware Platforms
Arduino, Pixhawk, SLAMDUNK, Parrot Bebop, ZED Stereo Camera
Key Projects
[click on project image to learn more]

Multi-robot spatial coordination
AASS,Örebro University
Augmentation GAN
Vision & Perception course project
Steganography with GANs
Neural Networks course project

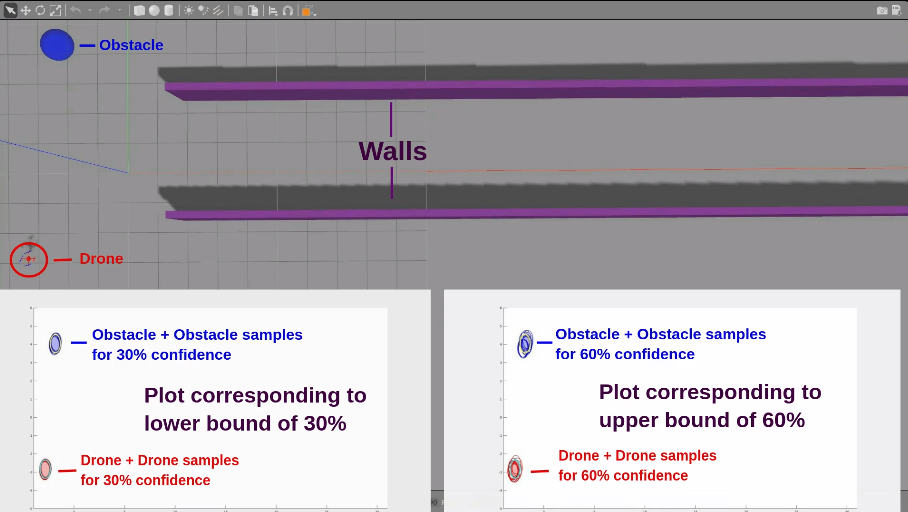
Autonomous collision avoidance on a quadcopter [video]
DTU

Team Unmanned Aerial Systems
DTU
Research
Below are my publications
- "Probabilistic obstacle avoidance and object following: An overlap of Gaussians approach" Dhaivat Bhatt, Akash Garg, Bharath Gopalakrishnan and K. Madhava Krishna. 28th IEEE International Robot & Human Interactive Communication, October 2019. [pdf]
- "Chance Constraints Integrated MPC Navigation in Uncertainty amongst Dynamic Obstacles: An overlap of Gaussians approach" Dhaivat Bhatt, Akash Garg, Bharath Gopalakrishnan and K. Madhava Krishna. arXiv preprint arXiv:1806.09929, June 2018. [pdf]
- "Delhi Technological University, Unmanned Aerial Systems Project" Team UAS-DTU. Journal paper for AUVSI’s Student UAS Competition - 2017. [pdf]
- "Autonomous Payload Drop System using mini-Unmanned Aerial Vehicles" Rohan Pratap Singh, Akash Garg. International Journal of Innovations in Engineering and Technology (IJIET)-Volume 7 Issue 3, October 2016. [pdf]
Contact
Contact me at: garg[dot]1892171[at]studenti[dot]uniroma1[dot]it